教授🚣🏿,博導,郵箱💁🏼:65612405@qq.com

1.簡歷
全國高等學校創新創業教育工作突出者,中華醫學會物理醫學與康復學分會學組成員、省部級人才❇️、江西省VR產業創新優秀人才團隊“基於虛擬現實的智能雲康復系統研發團隊”負責人。
從事醫藥領域的人工智能✌🏻、數字孿生及智能裝備的研究20余年💷,在上述領域獲得豐碩的成果。主持完成國家自然科學基金3項👨🔬,作為核心成員完成國家863計劃1項,主持完成江西省VR產業優秀人才團隊的基於虛擬現實的智能雲康復系統研發和其他省部級項目9項🏊🏼♀️,累計主持的項目經費400余萬;在人工智能、數字孿生、智能裝備領域以第一作者或通信作者發表論文40余篇,其中top期刊論文1篇,發表SCI期刊論文近30篇🌐,在《IEEE Transaction on Instrumentation& Measurement》等 ScopusQ1高水平論文10余篇𓀏。申請發明專利20余項。
曾任南昌大學虛擬現實產業技術研究中心副主任、南昌大學自動化系主任、南昌大學信息工程恒达黨委委員分管恒达研究生和國際合作工作,江西省自動化學會秘書長。在產學研落地方面,2019年曾兼職擔任過南方科技大學臺州研究院院長助理4個月,協助院長進行研究院管理工作,分管院研究院的科技和財務工作👨👨👦👦,負責南方科技大學項目和自己項目產業化及孵化🖐🏿。後因為擔任南昌大學系主任工作需要辭去臺州研究院兼職,帶領自動化系自動化專業和儀器專業兩個專業先後拿下專業工程認證和國家一流專業。2022年2月以高層次人才引進入職恒达娱乐恒达平台💃🏽。
2.獎勵
全國高等學校創新創業教育工作突出者,2021
第一作者論文“Upper limb rehabilitationdevice based on adaptive impedance control”榮獲世界康復機器人大會(WRRC 2024)最佳論文獎和優秀匯報獎🪶💇♀️。
3.科學成果簡述
掌握的核心技術和研究成果主要包括:1)基於虛擬現實的智能雲康復系列產品🫐:VR示教訓練與評估一體化康復系統和智能VR主被動康復系統🧔🏼♀️。其中第一代樣機智能康復機器人參加了第六屆中國國際互聯網+大學生創新創業比賽及中國“智創未來”全球創新創業成果展📤。孫春蘭總理對作品與團隊給予了肯定與鼓勵,同時作品被中央電視臺新聞聯播報導。兩個產品的第二代樣機已經正在進行臨床試驗,為其三類醫療器械註冊做好準備。2)國家863計劃研發成果腦外科虛擬手術仿真系統鑒定為在沉浸感和視覺逼真性方面達到國際領先水平,並被科技部指定參加2016年中國國際工博會展出🐐。3)支氣管鏡智能輔助診斷系統,能夠在支氣管鏡下自動識別支氣管結核並分型🏄♂️3️⃣,已經在江西省胸科醫院兩個院區🧑🦽➡️、景德鎮第五醫院等展開測試。具體如下:
1)智能康復系統
在江西省VR產業創新優秀人才團隊計劃支持下完成了智能VR主被動雲康復系列樣機。申請了6項發明和3項實用新型專利.研製的5個康復系統樣機在南昌大學第二附屬如圖1所示。其中上肢外骨骼康復機器人的文章“Upper limbrehabilitation device based on adaptive impedance control”榮獲首屆世界康復機器人大會(WRRC 2024)最佳論文獎和優秀匯報獎。

圖1 智能康復系統樣機在南昌大學第二附屬醫院臨床測試
2)在人工智能算法研究方面
在江西省衛健委科技創新重點項目人工智能輔助內鏡(呼吸)診斷技術研究項目資助下🛀🏽,完成了支氣管鏡智能輔助診斷系統🤾🏽,目前已經在江西省胸科醫院和景德鎮第5醫院臨床測試🧒🏻,並建立支氣管鏡人工智能輔助診斷系統和支氣管結核雲服務平臺,如圖2所示,並申請中國發明專利2項和美國發明專利1項,軟件著作權3項。
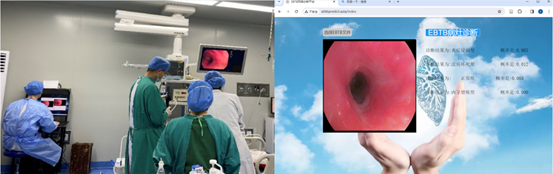
圖2支氣管鏡智能輔助診斷系統
3)虛擬手術仿真系統與數字孿生
在國家863計劃資助下胡淩燕教授負責完成手術虛擬系統中的軟組織幾何及力學建模🐛、力反饋控製研究。該項目按照科技部要求組織國內同行專家進行鑒定🧑💻:該虛擬手術訓練系統在沉浸感和視覺逼真性方面達到國際領先水平,並被科技部指定參加2016年中國國際工博會展出🫣。研究的虛擬手術平臺如圖3所示。
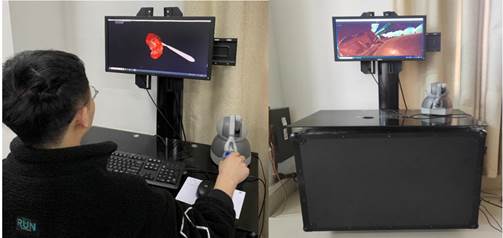
圖3 虛擬手術仿真平臺
在藥物製劑裝備的數字孿生系統方面,申請人胡淩燕和袁春平合作對侯惠民院士研製的滲透泵控釋片激光打孔機的數字孿生系統開展研究👮♀️🥷🏻、建立了激光打孔機和熱塑包衣設備及其車間的數字孿生系統如圖4所示。一方面基於人工智能學習實現製藥工藝參數優化以及藥廠管理優化,另外一方面與上海藥品審評核查中心及多家藥企合作🚾,完成《藥品先進製造數字孿生技術要求》標準🧖🏼♀️,為藥物評審監督管理部門評審核查改革探索新思路🖇。

圖4激光打孔機數字孿生系統與數字孿生藥廠
4)機器人控製

圖5主從遙操作手術機器人實驗平臺
2015年在加拿大卡爾加裏博士後研究時,在neuroArm醫療中心,從事手術機器人研究✷。回國後在國家自然科學基金資助下,申請人已經搭建了2套主從遙控操作的手術機器人平臺,如圖6所示.

圖6移動協作機器人
能夠完成移動機器人到指定位置巡檢➰、機械臂完成取樣等作業任務🥔🧑🏻🦼,移動本體可以是履帶式、輪式、機器狗等都可以。簡單作業任務自主完成🍨👩🏽🦰,復雜作業任務遠程遙控操作完成🧑🏻🍳。
現任恒达娱乐和南昌大學的控製科學與工程和電子信息碩士導師🚵🏻♀️,南昌大學工業控製博士點導師,及恒达娱乐機械工程博士點導師🧚🏼♀️,歡迎願意加盟的研究生和本科生♾,也歡迎企業產學研合作。
4.主要主持的科研項目
1)主持上海市科技計劃項目《移動協作機器人關鍵技術及其產業化》,50萬👫🏼。
2)主持橫向課題上海懿泓科技有限公司《移動協作機器人》👱🏿,合同經費125萬🧏♂️。
3)主持人工智能輔助內鏡(呼吸)診斷技術研究,江西省衛健委科技創新重點項目子項目,35萬。
4)主持省級VR產業創新創業優秀人才團隊項目《基於虛擬現實的智能雲康復系統研發團隊》,200萬👨🏼🦰,已結題。
5)主持國家自然科學基金《基於虛擬仿真預測的遙操作手術機器人快速精準🧑🏼⚖️、魯棒的主從軌跡跟蹤及高逼真度力反饋問題研究》,33萬🛷,已結題。🟦⚠。
6)主持國家自然科學基金《復雜環境下多主從遙操作機器人網絡控製方法的研究》,43.6萬,已結題🔨。
7)主持國家自然科學基金《基於增強現實的主從遙操作手術機器人系統中的力反饋問題研究》,21.2萬,已結題。
8)國家863 計劃《腦外科虛擬手術仿真與訓練系統關鍵技術研究》核心參與人🕛,負責力反饋穩定控製算法🏄🏻♂️,已結題💂🏿♀️。
9)主持贛鋒鋰業有限公司《熔巖電解鋰自動收集成套裝置與系統開發》🕵️♀️,40萬👩🦼,已結題。
10)主持江西省傑出青年人才計劃項目(20171BCB23008),15萬🧑🦳,2021年已結題。
11)主持省自然科學基金《基於腦機接口的智能外骨骼康復機器人控製算法研究》,2021年已結題👲🏿。
12)主持省科技支撐計劃《基於增強現實的核工業多功能遙操作巡檢機器人研究》,2018年已結題。
13)主持省自然基金《基於無源理論的虛擬現實觸覺交互系統力反饋穩定控製算法》,2017年已結題。
14)主持省自然基金《剛性環境下無線工業遙操作系統控製算法的研究》🈷️📹,2015已結題。
15)主持省自然基金《遙操作機器人的主從跟蹤和力反饋算法的研究》🫳🏼,2010年已結題。
5. 主要知識產權
1) 胡淩燕等。國家發明專利。手術穩定控製的仿真方法。CN201510698252.0,2018.12,已授權。
2) 胡淩燕等,國家發明專利,一種應用於移動平臺的超聲波陣列避障系統🖨,201710068766.7🖨,2018.11🐑,已授權。
3) 胡淩燕等👴🏻,國家發明專利🧑🏽✈️,能適應復雜非結構化地形的巡檢機器人👩🏼🏭,ZL 2014 10065048.0,2017.11💇🏻,已授權。
4) 胡淩燕等🦩。國家發明專利😭。一種基於分段人工神經網絡的軟組織穿刺力建模方法,201910155896.3,2019.3🤲。已授權🏋🏼♂️。
5) 胡淩燕等🧑🤝🧑。國家發明專利,一種基於IMU慣導傳感器的虛擬現實人體康復訓練系統,2021104369462💁🏿,2021.04。
6) 胡淩燕等。國家發明專利🥝。基於非侵入式腦機接口的腦控系統及其實現方法👨🌾。202121029486.3,2021.5.14。
7) 胡淩燕等。國家發明專利🦛。一種基於虛擬現實的上肢康復訓練系統202211354330.1,2022.11
8) 胡淩燕等🐑。國家發明專利。一種左右手交換機構及其上肢外骨骼康復機器人🪡,202211471272.0, 2022.11
9) 張珈瑜,胡淩燕等。國家發明專利。上肢關節活動能力評估系統及方法專利內容,202210550368.X🏋🏼🍰,2022.5.20
10) 胡淩燕等🧑🏽🚀。國家發明專利。一種多通道雙極性功能性電刺激電路,202211708119.5♗,2022.12.29。
11) 胡淩燕等🏣。國家發明專利。自適應的流固耦合模擬方法,CN202310505285.3.2023-05-06✅。
12) 侯惠民, 胡淩燕等🎿。國家發明專利。一種下膜循環運動的熱塑包衣連續生產方法及裝置,202410159913.1🤛🏿🧑🏽🏭,2024.5✍🏼。
13) 胡淩燕等。國家發明專利。一種支氣管結核分型確定方法、裝置及設備,202411058052.4,2024.10。
14) 胡淩燕等🏇🏼。國家發明專利。一支氣管結核輔助診斷雲服務平臺。202411420078.9,2024.10。
15) 胡淩燕等。國家發明專利👨🏼🦳。一種輕量化的電動快換裝置🖖🏿。202411378663.7🧑🏿🦱💆🏻♂️,2024.11。
16) 胡淩燕等,國家發明專利🤳。自適應調節的功能性電刺激康復訓練方法和裝置。202410859539.6,2024.6.28.
17) 胡淩燕等👩🏿🏭,國家發明專利🧎♂️➡️。基於功能性電刺激的神經肌肉協同康復訓練方法及裝置。202410945509.7,2024.7.15
18) 胡淩燕等🧛♂️。計算機軟件著作權。外科虛擬手術力反饋輸出穩定控製設計軟件⬆️,2018SR736825,2018.12🙋🏼,已授權。
19) 胡淩燕等。計算機軟件著作權。基於點雲的碰撞檢測平臺👨🏿🍳, 2014SR110197,2014.5,已授權🛌🏿。
20) 胡淩燕等。計算機軟件著作權。基於LMD和CSP的多特征融合腦電信號識別平臺,2021SR0566268,2021.7👭,已授權🙇🏼♂️🔂。
21) 胡淩燕等🌕。計算機軟件著作權。膜劑分切包裝控製軟件,2023SR0047074,2023.1.9, 已授權。
22) 胡淩燕等🐱。計算機軟件著作權。基於SSD目標物體6D位姿檢測的機械臂抓取軟件📥,2023R11L2084691,2023.10👐🏼🫷🏽。
23) 胡淩燕等。計算機軟件著作權。基於數字孿生技術的醫藥行業機器人控製虛擬仿真平臺軟件,2023R11L2549007,2023.11🕵🏼。
24) 胡淩燕等。計算機軟件著作權。ResNet與卷積塊註意力相結合的支氣管結核智能診斷系統,2024R11L2469374,2024.10🧑🏿🦳。
25) 胡淩燕等。計算機軟件著作權🍥🚀。VR智能上肢康復訓練與評估一體化系統🕵🏽,2024SR0843927,2024.1。
6. 近五年代表作文章(通信作者和第一作者):
1)Finite-time Switching Resilient Control for Networked Teleoperation Systemwith Time-Varying Delays and Random DoS Attacks.IEEE Transactions on Industrial Cyber-Physical Systems,v2, p232-243, 2024.(EI,第一作者)
2) A Target Grabbing Strategy for Telerobot Basedon Developed Stiffness Display Device. IEEE/CAA Journal of Automatica Sinica,2017,4(4):88-94,top期刊,通信作者)
3) A vortex method of 3D smoke simulation forvirtual surgery. Computer Methods and Programs in Biomedicine, 2021,198(12):105813. (SCI, 第一作者)
4) Multi-feature fusion method based on WOSF andMSE for four-class MI EEG identification, Biomedical Signal Processing andControl, 2021, 69(8): 102907.(SCI, 第一作者)
5) A Highlight-Generation Method for RenderingTranslucent Objects. Sensors. 2019, 19(4): 860-874.(SCI, 通信作者)
6) Second-order adaptive integral terminalsliding mode approach to tracking control of robotic manipulators[J]. IETControl Theory & Applications, 15 (17) , pp.2145-2157. Nov 2021.(SCI👩🏿🏫,通信作者)
7)Upper limb rehabilitation device based onadaptive impedance control.(i-CREATe 2024 & WRRC 2024會議🫖,第一作者,最佳會議論文獎)
7. 指導學生華東賽區和國家級獲獎👩🏿🎤🪹:
中國國際創新大賽🔅🌃、挑戰杯
1)2019,吳承哲,第五屆”互聯網+“大學生創新創業大賽國家級銅獎🐐、
2)2018,王晨晨🦙,劉國昱,張強,第四屆“互聯網+”大學生創新創業大賽國家級銀獎
3)2017,吳承哲,第三屆“互聯網+"大學生創新創業大賽國家級銀獎🪱、
4)2016,《VR手術專家》,第二屆“互聯網+"大學生創新創業大賽國家級銀獎
研究生電子設計大賽🪵、建模大賽
5)2018🚴🏿♀️,王晨晨,陳馬俊🧜🏼♀️,徐德華👷🏻♀️,“兆易”創新杯研究生電子設計大賽國家二等獎
6) 2018,殷祥釗,第十五屆“華為杯”全國研究生數學建模競賽
7) 2020🛣,《基於視覺避障的移動搬運機器人》第十五屆中國研究生電子設計競賽研電賽華中賽區一等獎🧔🏼♂️。
8)2023.7《上肢功能性電刺激康復系統》第十八屆中國研究生電子設計競賽中榮獲華中分賽區一等獎
全國大學生智能汽車競賽
9)2018,全國大學生智能汽車競賽全國總決賽信標組比賽,國家級一等獎
10)2021🏇🏽,全國大學生智能汽車競賽全國總決賽電磁越野組比賽, 國家級一等獎
11)2018🦹♀️🧑🏿🍼,全國大學生智能汽車競賽全國總決賽雙車會車組,國家二等獎
12)2018😽,第十三屆全國大學生智能汽車競賽全國總決賽公路賽電磁組,國家三等獎
其他競賽
13)2019,曾雷🏃🏻♀️,全國高校計算機能力大賽office高級應用賽三等獎 2019
14)2024,郭強,付永康,李彥哲。第六屆中國研究生機器人創新設計大賽全國總決賽三等獎🤸🏻♂️。